

Optimizing system performance by visualising movement
Ergonomics (or human factors) is the scientific discipline concerned with understanding interactions among humans and other elements of a system, and the profession that applies theory, principles, data, and methods to design in order to optimize human well-being and overall system performance.
Optimize human well-being

Motion capture in ergonomics is one of the technologies for workplace analysis and human task analysis. Movella technologies utilize the assessment of the human body’s abilities and limitations – applying the learnings from human interaction with products, systems, and the environment for the purpose of improving efficiency, comfort, and safety.

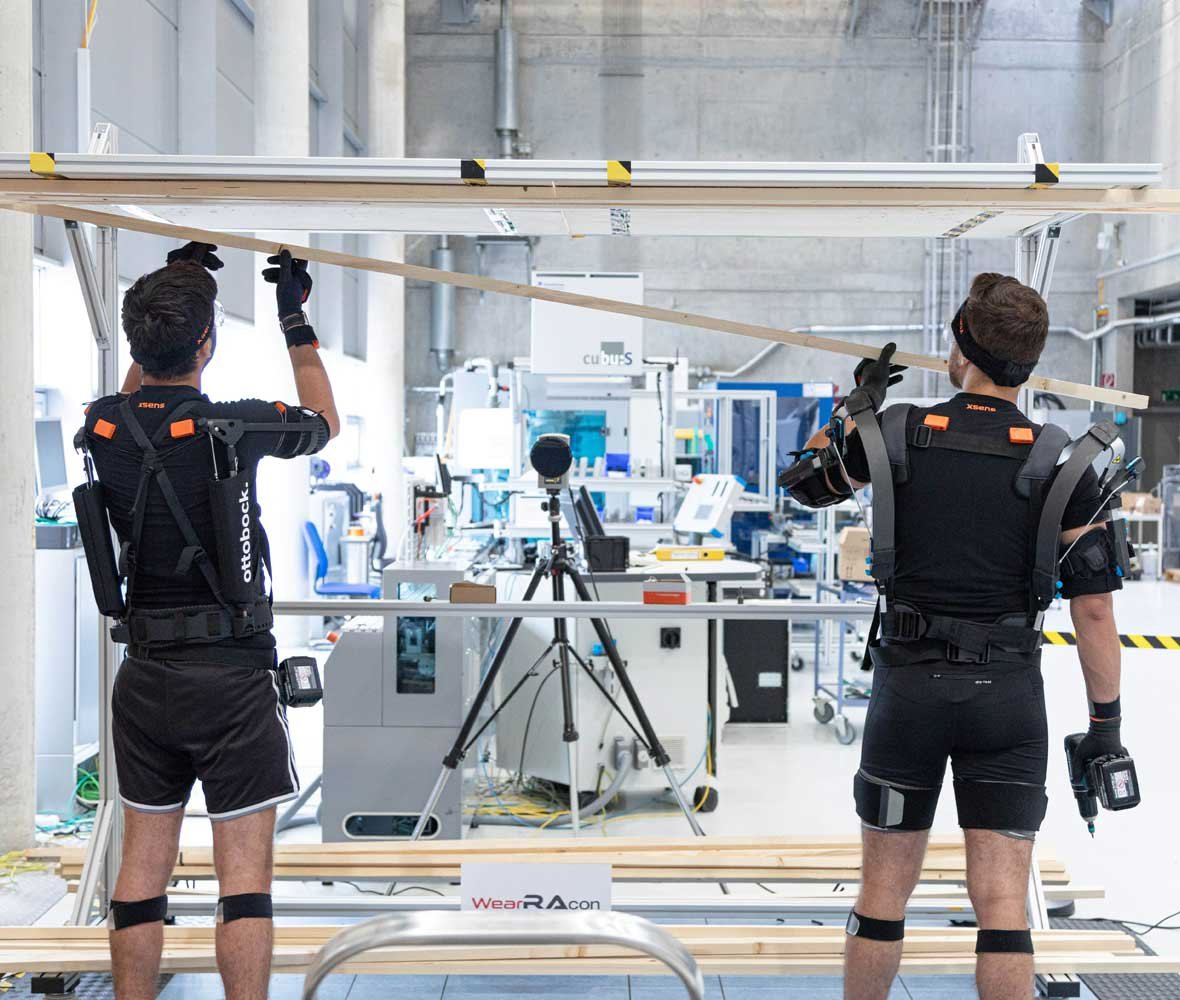
Measuring physical performance in a restrictive setting limits the quality of your results. Movella offers technologies for capturing, analyzing, and assessing data outside of the laboratory in any environment, in the moment.

What makes Movella different?
- Movella offers validated, peer-reviewed data, and features integrations with all market-leading software packages, offering you the highest quality in motion capture and analysis
- Our proven biomechanical model and sensor fusion algorithms ensure the highest-quality motion analysis, even in the most challenging magnetically disturbed environments
- Movella products are scientifically validated through use in several research projects and validation studies. Navigate through the relevant publications by visiting our dedicated Research and validation page
Recommended products

MVN Awinda is the most used system for human factors research. The system is unobtrusive and can be applied to subjects quickly and easily, over or under clothing. The data acquired by the system enables an accurate analysis of the subject’s movements via precise time-synchronized data sampling. Data can be recorded, viewed, and exported using MVN Analyze Software, or the system can be used with our MVN Reports solutions.


Our MVN Link system is the go-to solution for biomechanical research when it comes down to measuring high-dynamic movements or when data output is needed at a high data rate. The Link system offers on-body data recording for up to 10 hours. Data can be recorded, viewed, and exported using Analyze Software, or the system can be used with our MVN Reports solutions.

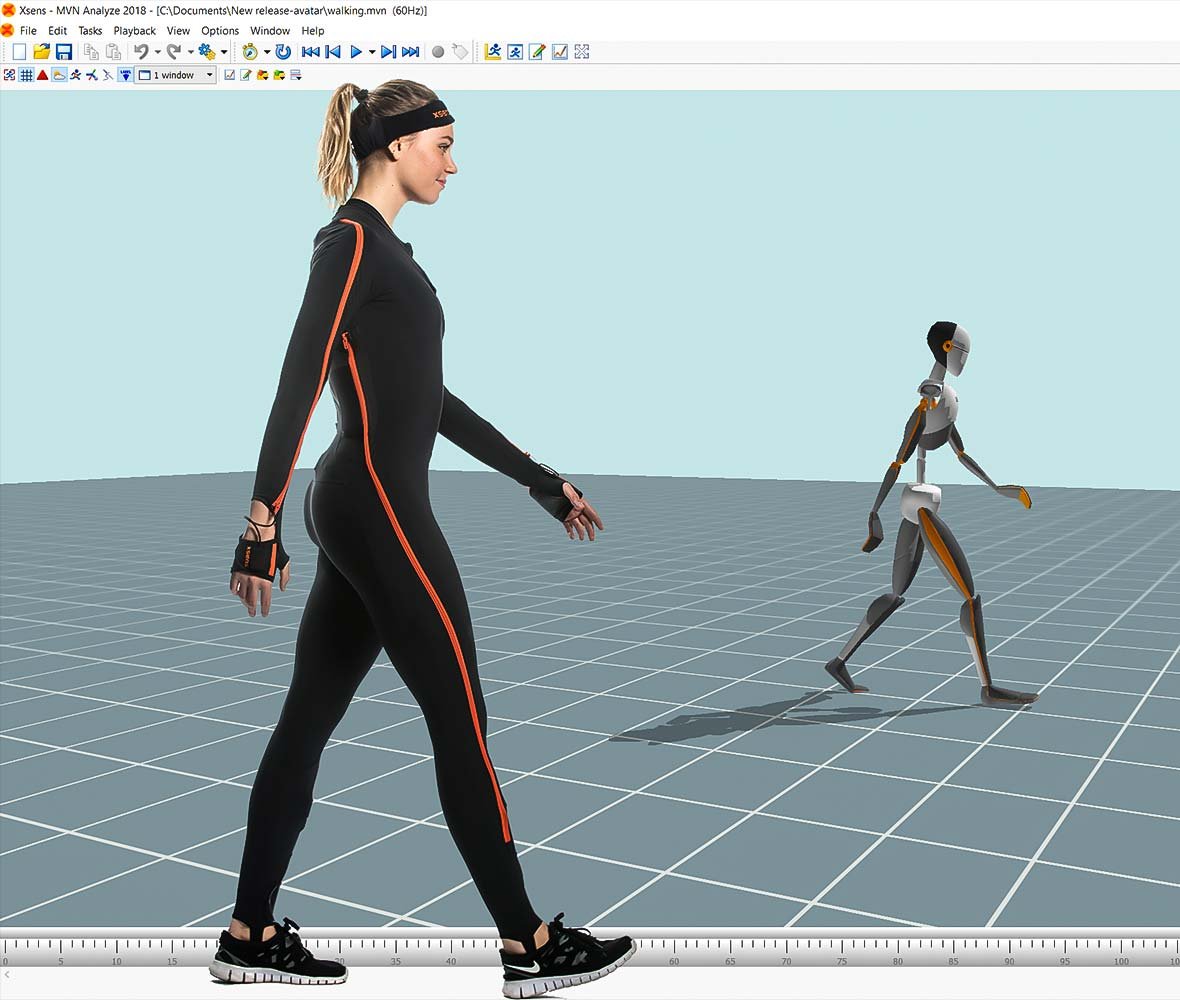
MVN Analyze is specialized software for human motion measurement. This software lets you record, view, and export the data from Xsens motion capture hardware systems (Link, Awinda, Awinda Starter).

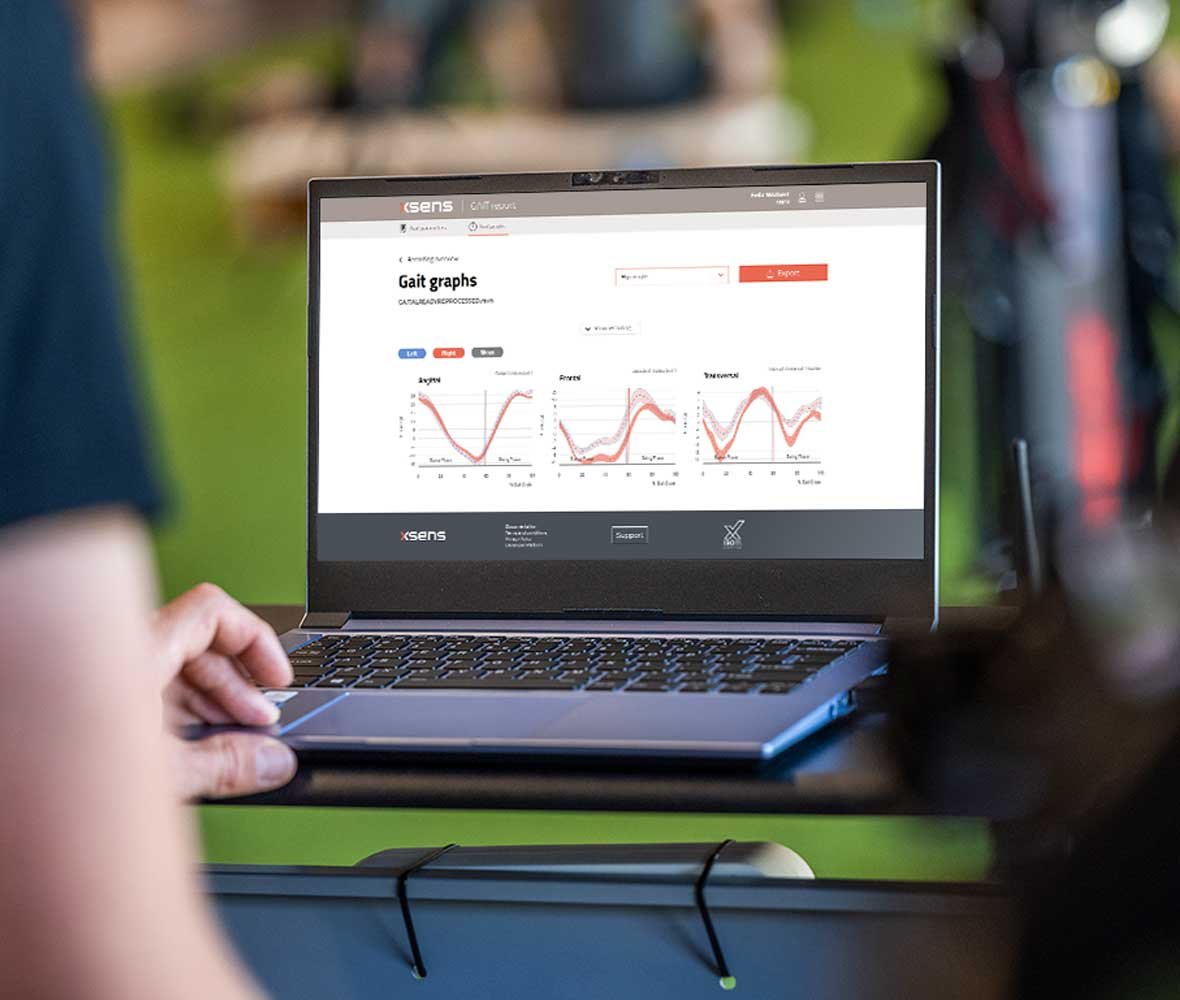
MVN Reports instantly present complex movement data in an accessible, easy-to-read report. With our standardized reports, like a RULA report, you can get your measurements “on the job” in a few minutes.


Integrations and plugins for MVN Analyze
Live stream or export your motion capture data seamlessly into your major biomechanics, ergonomics, and analysis software packages, including AnyBody, Visual3D, and Siemens PLM software, amongst others. Additionally, plugins are available for finger tracking, EMG, positional aiding, and more.
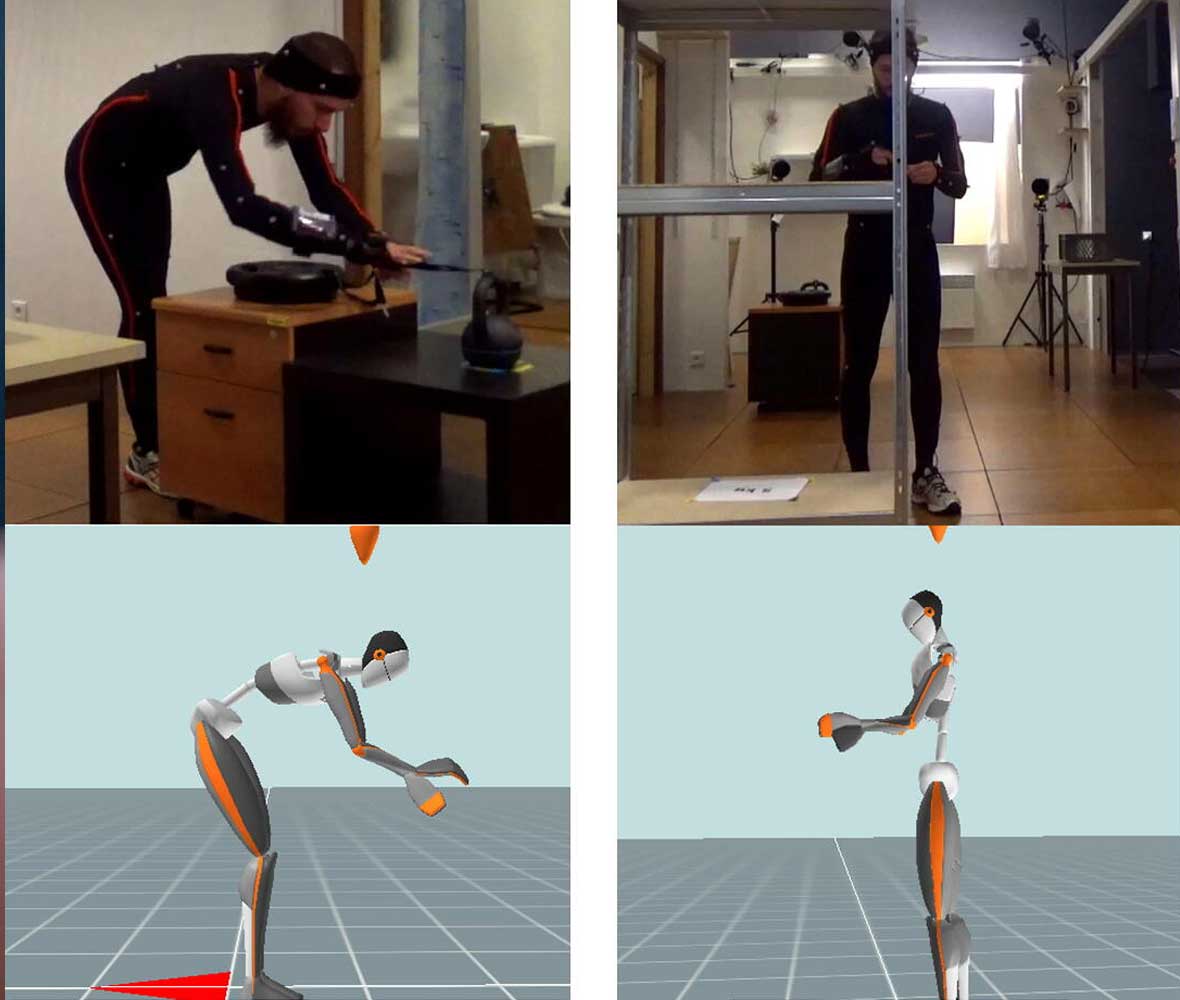
Application – The AnDy project
Researchers at AnDy use MVN Analyze to innovate the way of tracking the motion of human posture in real time. This translates to activity recognition used when performing an automatic assessment of full-body ergonomics.
Learn more about how the AnDy project uses Movella technology to produce anticipatory analysis with the assessment of full-body ergonomics.




