The Internet of Things (IoT) Lab coordinates the various on-going activities and collaborations, in the area of IoT and smart systems, between the Department of Engineering and Architecture of the University of Parma and private companies (both Italian and International), other Italian and International universities, and international/national/regional institutional agencies.
Localization and navigation
Some of the most active research directions of the IoT Lab focus on localization and navigation. Determining the positions and tracking the movements of subjects and/or devices in different environmental conditions enable a variety of new opportunities in IoT (but not only)-related applications, such as location-based services, access control, activity monitoring, navigation in challenging environments, etc.
Currently available commercial technologies, such as those based on GPS, perform adequately in open outdoor spaces, but their reliability and accuracy worsen drastically in urban and indoor environments. The aim of our lab is to develop easily-deployable, accurate, and environment-agnostic localization and tracking systems. Among the various technologies currently considered, inertial sensing-based navigation seems very promising. Ideally, by exploiting the signals acquired by inertial sensors, such as accelerometers and gyroscopes, they reconstruct the travelled path of a moving subject/object in any environment, without relying on external infrastructures (as in the case of the optical motion capture systems) or signals (as for the GPS-based solutions). Unfortunately, in real cases, an accurate tracking of positions and orientations is extremely difficult, because of the noise affecting the sensors’ measurements, which introduces drift effects and makes the system unreliable on the long period. For these reasons, a robust solution should rely on high-quality sensors and application-specific techniques for error reduction, especially when a limited number of sensing devices is used to reduce the complexity and the costs of the system.
Pedestrian Dead Reackoning (PDR)
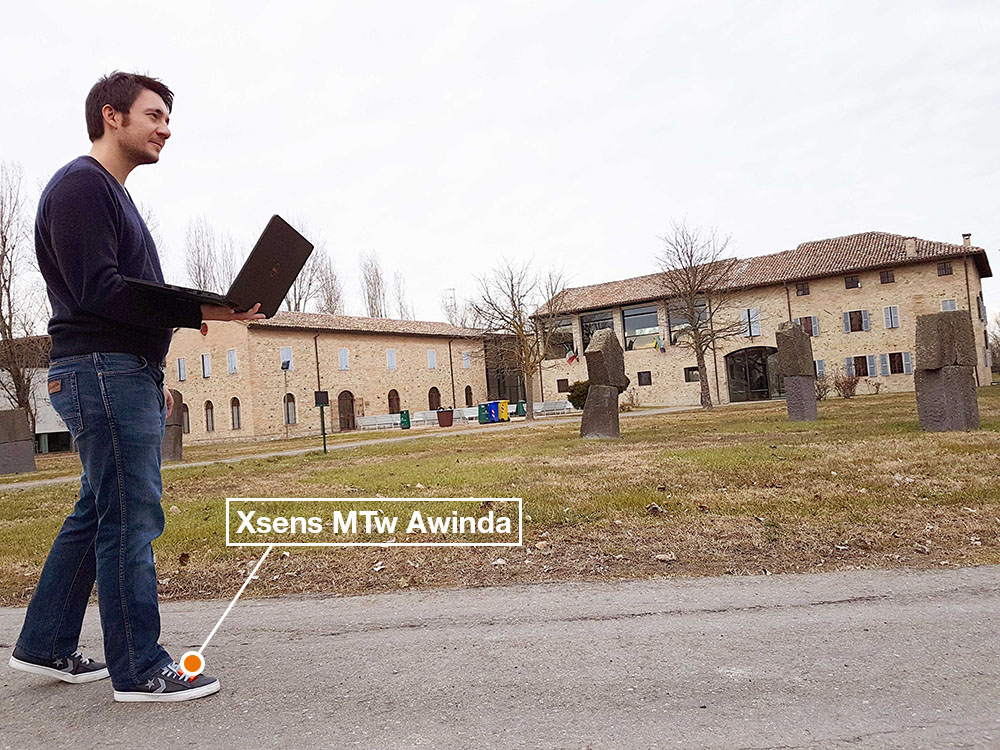
In the research context described in the previous paragraph, they have developed a Pedestrian Dead Reackoning (PDR) system, which relies on a single foot-mounted Xsens MTw Awinda sensor for reconstructing the 3D travelled path of walking subject. The signals acquired by the sensor placed on the foot, under the shoe laces (as can be seen on the left of Fig. 1), are received by the Xsens dongle connected to a laptop, on which a Matlab application (developed by IoT Lab) exploits a modified version of the API provided by Xsens for reading and processing the data. In particular, the system computes the 3D displacement of the foot every time a stance phase is detected. A modified version of a Zero Velocity UPdaTe (ZUPT) algorithm, which consists in double integrating the linear acceleration measured by the sensor during the foot swing phase, has been used for computing the horizontal movements. The displacement in the vertical direction is computed by using the measures provided by the barometer of the MTw node. An overview of the system is shown in Fig. 2. The obtained 3D position is, first, converted in longitude, latitude and altitude coordinates and, then, sent to a web server using ad-hoc implemented RESTful API—to this end, an Internet connection provided by a smartphone (which collects also GPS positions for comparison purposes) housed in the pocket of the test subject, has been used. The web server stores the coordinates and exposes the positions’ sequence through an intuitive web interface, which allows the user (and, eventually, any other device remotely connected to the server) to visualize the traveled path on a map (see Fig. 3).
In the video above, a real online test of the proposed system, performed at the Centro Sant’Elisabetta of the University of Parma campus, is presented. The web interface consists mainly of a map, on which the sequences of positions estimated by both the developed inertial-based system (blue path) and the smartphone’s GPS (red dots) are shown. Additionally, in the right column, the direction of the geographic North, the floor estimate (for indoor multi-floor navigation), and the GPS accuracy are displayed.
The Internet of Things (IoT) Lab
The Internet of Things (IoT) Lab coordinates the various on-going activities and collaborations, in the area of IoT and smart systems, between the Department of Engineering and Architecture of the University of Parma and private companies (both Italian and International), other Italian and International universities, and international/national/regional institutional agencies. As of today, there are about eight full-time members (faculty, post-docs, PhD students, research associates), together with several active collaborators. The current research activity of the IoT Lab focuses on three main interwoven research areas:
- signal processing
- advanced communication and networking
- Internet of Things and smart systems.
Interdisciplinarity is a key principle of all research activities. The scientific output of the IoT Lab has led to a large number of scientific publications and a few best paper/technical awards at leading international conferences. The IoT Lab is currently equipped with a large IoT testbed (with 150+ nodes), encompassing many wireless connectivity standards.
The Xsens testbed acquired by IoT Lab was co-financed through the Cooperative Planning Programme Fund of NATO (Science and Technology Organization - Collaboration Support Office) to carry out advanced navigation research activities in the context of the NATO RTG HFM 260 "Enhancing Warfighter Effectiveness with Wearable Bio Sensors and Physiologicol Models."



{kind=link}
{kind=link}
{kind=link}
