

Our expertise, your solutions
As a pioneer and global leader in motion tracking solutions, we provide best-in-class systems for navigating, controlling and detecting movement in complex industrial settings. From autonomous vehicles and drones to indoor and underwater robotics, our range of systems, combined with our knowledge and dedication to customer service, create the ideal ecosystem needed for you to take on all your challenges and develop new solutions.

Dependable quality, real value
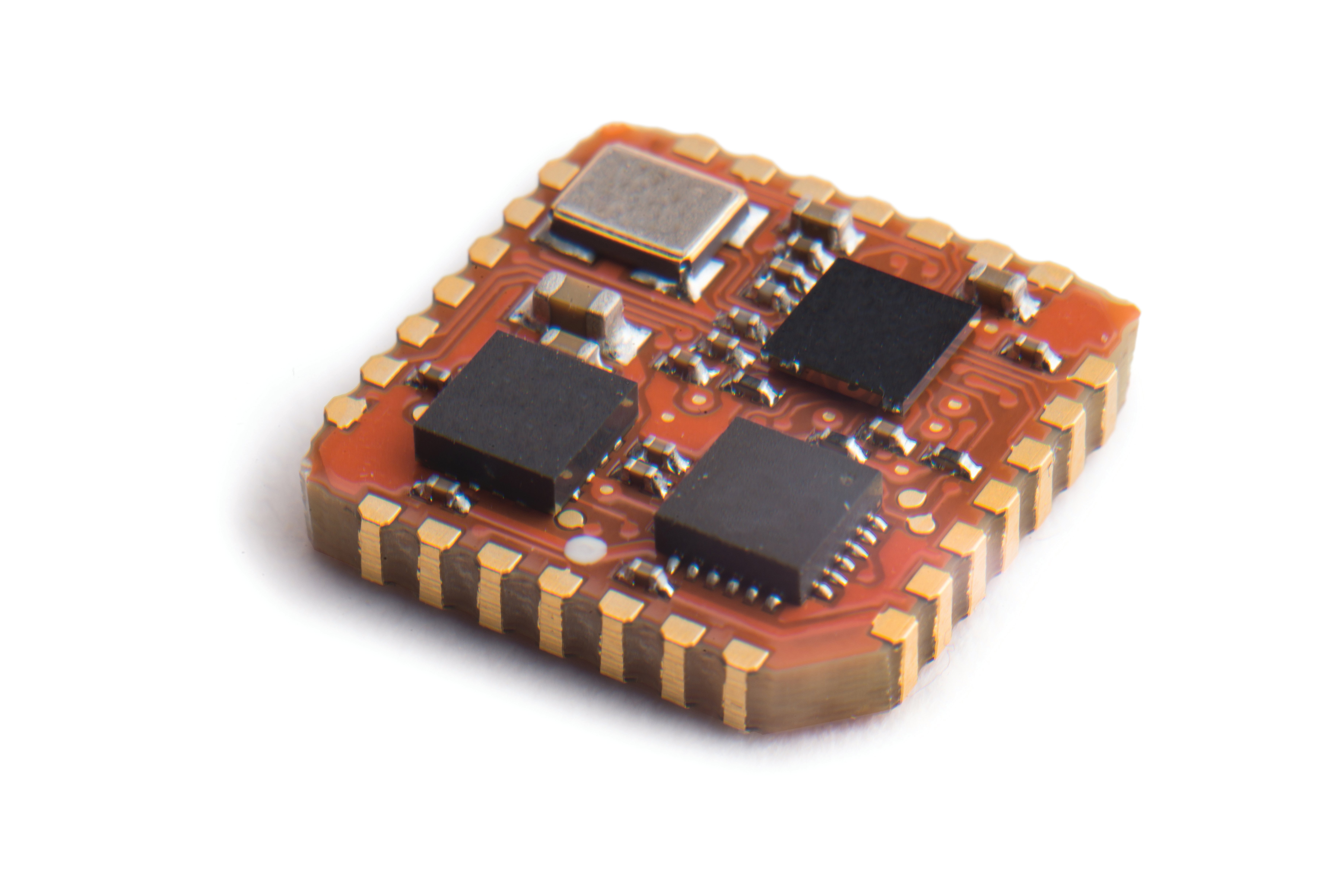
Robust 3D (ego)motion data, even under difficult (magnetic) conditions. Over 10 years of continuous improvements in sensor fusion algorithms, software, and component selection. Add to this, in-house testing, factory calibration to numerous standards, temperature bias-calibration to industrial standards, and sturdy construction to withstand extreme conditions. So, our modules have a lot to offer without asking a lot in return. These cost-effective modules range from basic inertial measurement units (IMUs) – often used as building blocks because of their versatility – to advanced real-time kinematic (RTK) GNSS-enabled solutions, providing positioning data of unmatched precision.

Plug and play configurability
What’s the point of making a great product if you don’t make it user friendly? Our products are highly configurable with all the data outputs and synchronization options you need to integrate them in your unique system architecture. With the widest portfolio of plug and play modules on today’s market, featuring three different form factors with eight interface options, you can confidently build on your own needs and specs. Save time and money while enjoying maximum creative freedom.
Want to discuss your wishes with an expert?

Product selector
With our online product selector tool, you can go straight to our MTi products overview and explore or compare the solutions you are interested in.

Functionalities
An inertial measurement unit (IMU) is a self-contained system that provides raw, calibrated sensor linear and angular motion data with a triad of gyroscopes and a triad of accelerometers. IMUs are often used as building blocks in more complex systems.

A vertical reference unit (VRU) measures roll, pitch, and (unreferenced) yaw. Its sensor-fused data level is used for dynamic positioning in a variety of contexts. VRUs are the perfect solution for locations with high magnetic interference, as they do not rely on magnetic referencing.
An attitude and heading reference system, or AHRS, provides 3D orientation by integrating gyroscopes and fusing this data with accelerometer and magnetometer data. The yaw output is referenced to true north and the result is a drift-free orientation.

Real-time kinematic (RTK) positioning is a satellite navigation technology used to increase the precision of position data obtained from satellite positioning systems.
Applications

In travel and transport, autonomous vehicles are on the rise. The range of possibilities in this field is extensive. So is the list of tech requirements needed. Our MTi products can be used in any of these areas.

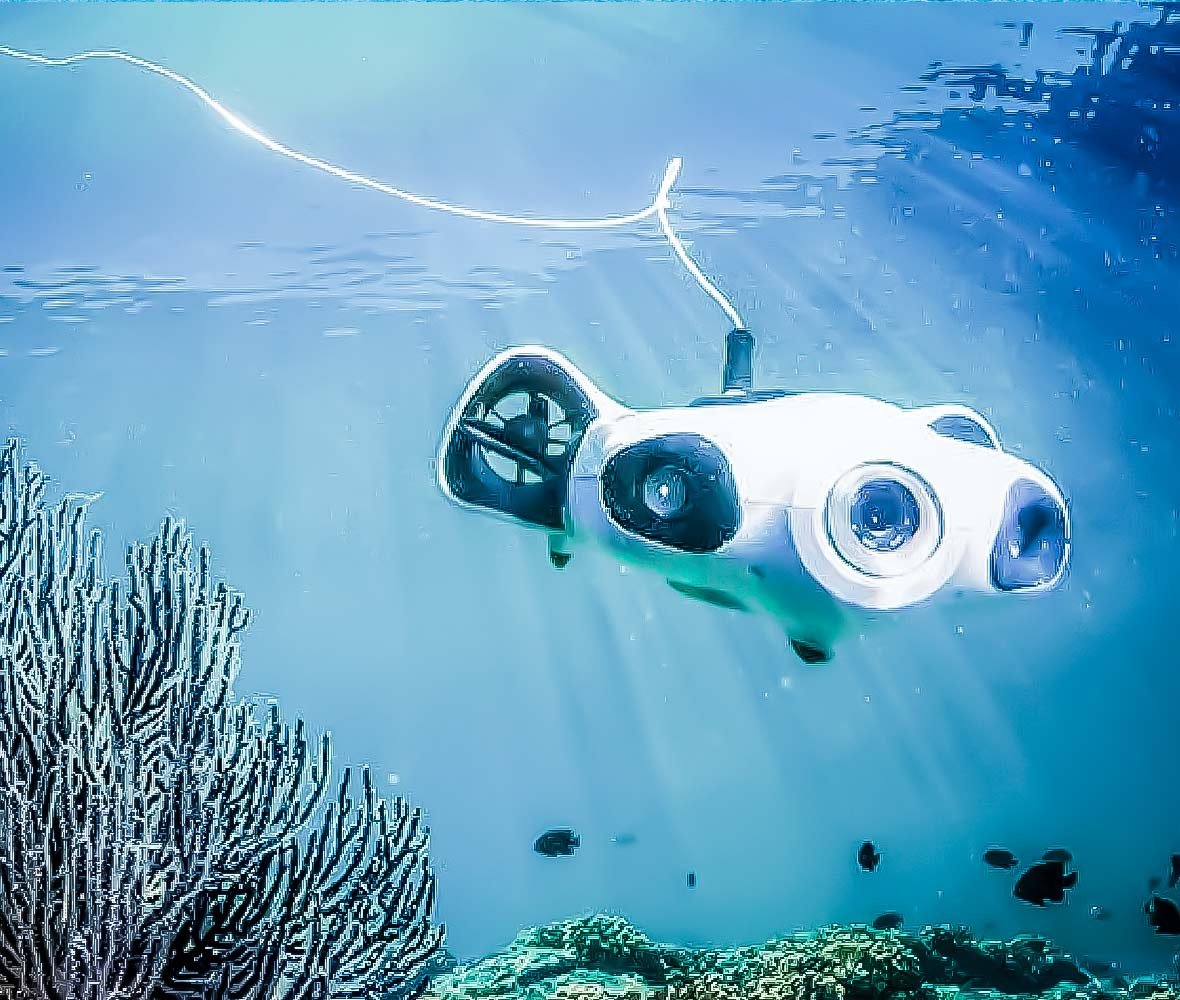
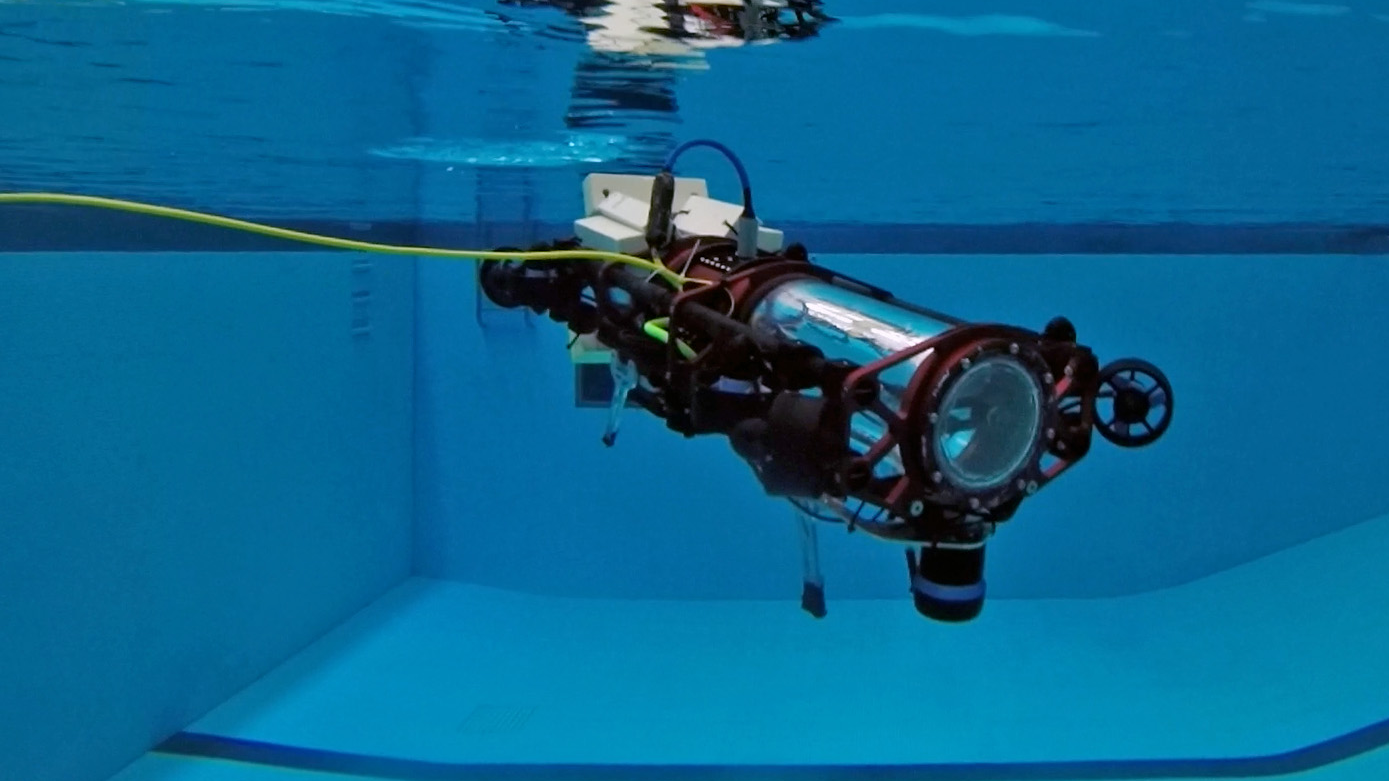
Reliability and precision are of the utmost importance in this field. The robust hardware and software, along with the anti-magnetic distortion filters of the MTi series, make them a highly suitable, stable platform for motion technology applications at sea and in seaports.


Aerospace and drone applications require ever-increasing accuracy and precision. Whether you need low-power consumption, low-latency, high-speed processing, or a lightweight and small motion tracking sensor, you’ll find a fit for any aviation, air, or space application.


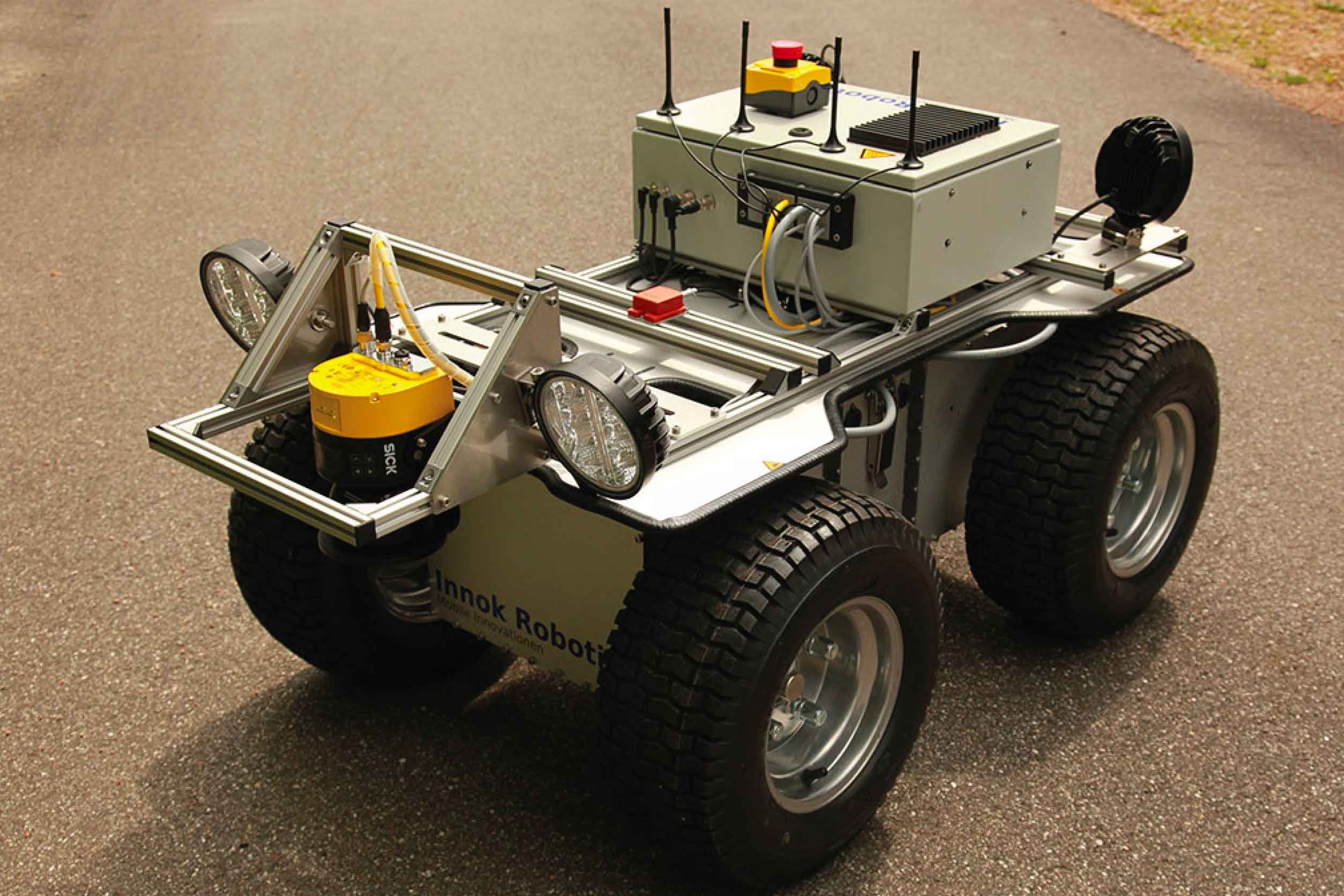
Indoor mobile robots are getting smarter all the time, thanks to collaborative robotics, autonomous vehicles, sensor technology, and the Internet of Things (IoT). Our MTi solutions meet all the specific demands of this application.


Custom motion tracking solution
Looking for a custom motion tracking solution? We’ve got you covered. We’ll form a team to discuss your needs and leverage our 10+ years of knowledge in MEMS-based hardware/software design to help you develop a fitting solution and produce the perfect motion tracker for you.
.jpeg?width=1621&height=1080&name=MTi-200%20(Large).jpeg)


.jpeg?width=1620&height=1080&name=MTi-670b%20(Large).jpeg)

-jpg-2.jpeg?width=1624&height=1080&name=MTi-680b%20(Large)-jpg-2.jpeg)
.jpeg?width=1621&height=1080&name=MTi-G-710%20b%20(Large).jpeg)
