27th August 2014
Authors: Tim Bosch, Reinier Könemann and Michiel de Looze, TNO The Netherlands
TNO has recently evaluated a new order picking workstation for Vanderlande Industries. In semi-automated warehouses so-called goods-to-man or parts-to-picker transportation systems (instead of ‘man-to-goods’) have been introduced (e.g. Bosch et al. 2008). This implies that operators may now stand relatively still at a stationary workstation, picking products out of product bins and placing them into order bins. At the same time however, the workers are exposed to a long duration and high frequency of arm movements, as periods of loading of the upper extremities during picking and placing are no longer interspersed with periods of unloading while moving through the warehouse. The design challenge here is to find the optimal locations for all these bins to optimize, among others, upper arm elevations.
In the current study a one layer design (horizontal plane), where all bins are placed on the optimal vertical level (waist height), has been evaluated. Moreover, the aim of the study was to assess the effect of bin location on upper arm kinematics.
Methods
Eight healthy order pickers participated in the study (four males and four females). They were all familiar with order picking, but had no specific experience with the order picking station that was used in the current study.
Watch order picking with Xsens MVN:
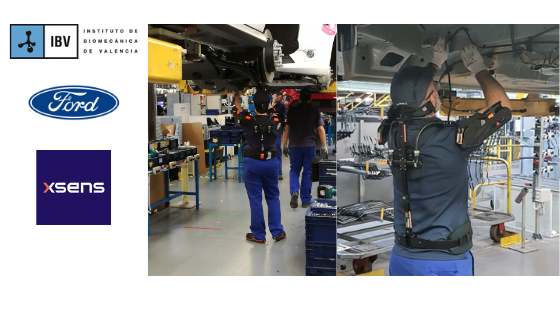
The participants performed a task on a high-volume order picking workstation, where products had to be moved manually from centrally located product bins to order bins on the sides. Eight conditions were performed with four different order bin locations (inner/outer and left/right) and two product types. Only results on bin location are shown. The first hand-arm activity was to pick one product out of the product bin. The second hand-arm activity was to move the product and place it into one of the order bins. The third and final hand-arm activity was to press a button, to confirm the placement of the product in the order bin.
The movements of the participants were recorded by a full body inertial motion capture system (MVN Analyze). This system comprises a suit, equipped with 17 MTx sensors. Prior to the experiment, participants’ body dimensions and calibration poses were measured according to Xsens® calibration protocol with the MVN Studio Pro-software, to fit and scale the MVN Analyze-model to the participant. Positions of anatomical landmarks were not measured directly, but derived from sensor orientations in combination with the biomechanical model. The anatomical landmarks were collected at a sample rate of 120 Hz and exported in a C3D format. A dedicated Matlab program (version 2010b, The Math Works, Inc.) was used to calculate the left and right upper arm elevation. For upper arm load, guidelines (e.g. ISO 11228-3 2007) generally consider an enclosed angle between upper arm (or trunk) and the vertical axis of 20° as a threshold, implying that upper arm elevations below this value are considered ‘safe, not affecting health’. Therefore, as an exposure measure, the integral above the threshold of 20° was calculated, for the upper arm elevation angle. This time integral was analyzed using a repeated-measures ANOVA.
Results
The average peak amplitude of right and left upper arm elevation was 34.7° (SD 4.9) and 32.9° (SD 6.5), respectively. A significant effect of the lateral order bin distance (order bin location) was found. The left and right upper arm elevations were higher for the outer than for the inner order bins (see figure in sidebar, F=9.3, p=0.019 ).
Discussion and conclusion
In the current study, we investigated the effects of lateral bin distance on upper arm kinematics in a one-layer order picking workstation. A larger lateral distance to a placing location results, per cycle, in a higher time integral for upper arm elevations (right and left) . These results show that for the outer bins, which were a few steps away from the central position, the upper arms were elevated above 20 degrees more frequently, compared to the inner order bins, which were within direct reach of the subjects. In line with these higher number of peak elevations, we also observed a higher time integral of upper arm elevations above 20°.
As the vertical height of inner and outer bins is equal, there is no need for more upper arm elevations. Thus, the increased number of upper arm elevations is the result of a different picking and placing behavior, freely chosen by the subjects and not enforced by the workstation design. This suggests that subjects do not walk the full distance to the product and order bins, but instead choose to reach for the bins, which requires more upper arm elevation.
No other studies reported effects of distance on body kinematics in picking and placing tasks in which people had to walk. On the other hand, numerous studies have addressed reach distances and body kinematics in static tasks. In these studies, reach envelopes and reaching modes (arm and trunk involvement) with resulting normal/comfortable horizontal working area were determined (e.g. Gedliczka et al. 2007). In these studies, the freedom in behavior is very limited compared to the workstations studied here at which people walk from one location to another (e.g. high volume order picking). Our study showed that the information on reach envelopes or reaching modes obtained from relatively static tasks cannot be extrapolated to more dynamic (‘walking’) tasks where body angles of workers are influenced by walking and whole body movement strategies.
References
Bosch, T., M. P. De Looze, and M. C. Ten Hoor (2008). Sustained performance and workload in order picking. NES 2008 Abstracts: Ergonomics is a lifestyle: 77-78.
Gedliczka, A., M. Konarska, K. Hamiga, Z. Machynia, K. Starzynska, J. Mircea, and C. Noworol (2007). Defining Space Models of Arm Reach Envelopes for Static Forced Postures. Occupational Ergonomics 7 (4): 219-231
ISO 11228-3:2007. Ergonomics -- Manual handling -- Part 3: Handling of low loads at high frequency

Related articles